GISと連携する移動ロボット知能モジュールの開発
(株) 環境GIS研究所 (財) 九州先端科学技術研究所
“GISと連携するロボットシステムでロボットの活動範囲を広げられないだろうか?”このアイデアの試作と実験を実施
国の支援する「次世代ロボット知能化技術開発プロジェクト」において、屋外を知的に移動できるロボットを実現するためのGIS機能モジュールの開発を進める。
R-GISの取り組み
社会の少子高齢化に伴い、人間生活を支援するサービスロボットの実用化への期待が高まっている。すでに屋内清掃などの用途において自律移動ロボットが実用化されているが、サービスロボット市場は2025年に6.1兆円の市場規模に発展するとされ、成長分野として注目を集めている。人間の生活空間でロボットが活動するためには、ロボット自身に周囲の環境・状況の認識能力や自律的な判断能力が必要となる。
そこでR-GISコンソーシアムでは、GIS技術とロボット技術を融合させ、ロボットが実空間で活動し、人間や複数のロボット間で環境・空間情報を共有することができるロボットGIS「R-GIS」の研究開発を進めている。本開発ではロボット向けGISの機能を、「RTミドルウェア」で動作する「RTコンポーネント」として実装している。RTコンポーネントは、アルゴリズムをカプセル化し、外部とデータやサービスをやり取りするためのポートと呼ばれるインターフェースを公開することで他のRTコンポーネントと接続して動作するシステムを構築できるモジュール的な仕組みである。これによって、ロボットサービスの提供者が必要なロボットパーツとRTコンポーネントを組み合わせ、利用者の多様なニーズに即したロボットを効率的に構築できるようになる。
(RT: ロボット技術 Robotic Technology)
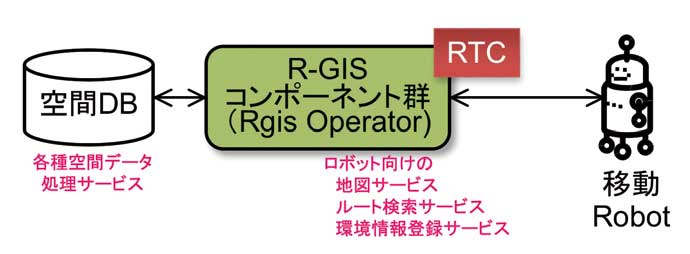
R-GISのコンポーネント接続例
開発した知能モジュール群
R-GISの機能を提供・利用する代表的な知能モジュール群について説明する。

車椅子ロボットの外観
1)R-GISモジュール
R-GISモジュール(RgisOperator RTC)は、GISデータの処理を行うサービス型モジュールである。空間データベースと接続して、位置情報を登録・検索したり、座標系の変換、ベクトル図形データからロボット用グリッドマップの生成、グリッドマップによる最小コスト探索、空間データのファイル出力などを行う。空間データとしてはPostGISおよびシェープファイルに対応している。
2)地図管理モジュール
地図管理モジュール(MapManagement RTC)はR-GISに接続するモジュールであり、移動ロボットがR-GISに処理を要求し結果を受信するためのモジュールである。
3)トータルステーションモジュール
トータルステーション(TS)とはレーザ距離儀と測角器を備えた測量機器であり、全方位再帰性プリズムまでの距離と方向を正確に計測することができる。プリズムをロボット上に設置することで、TSはプリズム方向に自動追尾しその位置座標を連続して取得できる。これは屋外環境でGPSを使用せずにロボットの自己位置推定を行うことや、将来の測量ロボットでの使用を想定している。
R-GISを用いた移動ロボットによる実証実験
R-GISコンソーシアムでは、福岡市東区のアイランドシティ中央公園を実験フィールドとして、ICチップを内蔵したインテリジェント基準点の設置や公園内部の詳細なGISデータの構築などの環境整備を進めており、2009年5月からR-GISモジュールを使用した車椅子ロボットの実機検証実験を行っている。
1)ロボット向けGISデータ作成
ロボット向け地図データとして、進入できない領域を示す「障害物領域データ」や、通行できるが極力避けて通りたい領域を示した「移動コスト領域データ」を作成する。具体的には園路の外側の植え込み等は障害物ポリゴンとして、園路の端やロボットが通行しにくい箇所は移動コストを高く設定した移動コスト領域ポリゴンとしてGISデータを作成した。
2)GISデータを用いた経路計画の流れ
RgisOperatorは移動ロボットの経路計画のため、障害物領域データと移動コスト領域データを元に、指定された目的地までの累積コストグリッドを生成する。ロボットは累積コストグリッド上の自己位置に当たるセルを起点として、周囲のセルのコスト値の低い方向に移動を繰り返していくと、最小コストで目的地に到達できる。

ポテンシャルグリッドマップの例
つくばチャレンジへの参加
人々が生活している空間の中で、ロボットが確実に自律的に動き回って働くための技術を競う「つくばチャレンジ」という競技会が2007年からつくば市にて毎年開催されている。
1)つくばチャレンジ2009とR-GIS
2009年の大会では、つくば市の中央公園を周回する1km強のコースをロボットの判断だけで移動することが課題として設定され、日本全国から72チームが技術を結集したロボットで参戦した。
R-GISコンソーシアムは今回初出場の福岡大学フューチャービジョンチームと提携し、GISを活用したロボット移動環境マップの作成やRgisOperatorによる経路計画などの技術支援を行った。
本走行ではコースアウトによるリタイアとなったものの、前日のトライアル走行では全チーム中9位の好タイムで通過するなど、今後の発展が期待できる成果を上げた。
2)ロボット用の地図作成のためのGIS
今回のチャレンジではロボット用の地図データを構築するためにArcView 9.3を使用した。走行コースの平面図をトレースするところから始め、現地にてVRS-GPSを用いた詳細な測量を行いつつ地図の修正を繰り返した。ロボット工学の専門家が集まる中で、環境の地図情報をGISで整備しているところは他になく、この分野では新しい試みであったようだ。ArcViewによるロボット地図の編集について、あらかじめ演習を行っていたこともあり、今回はじめてGISを利用するロボット技術者が実際のフィールドにて地図データの最終調整が行えたことは、新しいGISの利用分野の可能性が感じられるものであった。
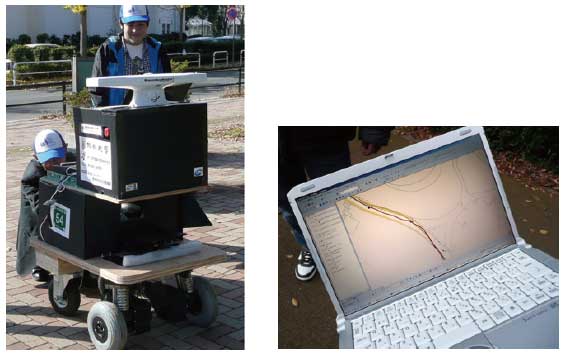
つくばチャレンジ出場ロボットとGISによる地図編集風景
おわりに
R-GIS研究開発プロジェクトは、(財)九州先端科学技術研究所と(株)環境GIS研究所のR-GISコンソーシアムが、「NEDO次世代ロボット知能化技術開発プロジェクト」の一環で実施したものであり、他のロボットやサービスロボットの研究者との意見交換やGIS講習会も行っている。
プロフィール

環境GIS研究所
代表取締役 荒屋 亮 氏(左)
九州先端科学技術研究所
生活支援情報技術研究室長 木室 義彦 氏(中)
生活支援情報技術研究室研究員 家永 貴史 氏(右)
関連業種
関連製品
資料
掲載日
- 2010年1月1日